



























The MOC 10 trawl is lowered from the stern of the research ship. The collecting nets will remain closed until they reach the desired depth. Then they will be opened either electronically or mechanically by controls on the ship. Click image for larger view and image credit.

The Global Explorer, a remotely operated vehicle (ROV), is lowered from its mother ship into the sea (seen here on a previous expedition to the Arctic). A high definition video camera in an underwater housing (a large black cylinder, lower center), still digital camera (in yellow housing), and other video cameras that the pilots use to guide the ROV are mounted on the frame in front. Six lights in white reflectors will illuminate the scene when the ROV descends into the darkness of midwater. The large funnel and plastic tube on the starboard side of the ROV (lower left) compose the front end of the suction sampler. The two clear canisters on the lower frame are used to collect larger animals. This requires much skill on the part of the ROV pilot, who must use the video cameras to guide the ROV into position with an open canister below the animal, then slowly rise until the animal is inside the canister and hydraulically close the top and bottom lids before it can escape. Click image for larger view and image credit.
Midwater Technology
Emory Kristof
National Geographic Society
Exploring the Inner Space of the Celebes Sea 2007 will provide the most complete vertical inventory of marine life ever accomplished in a short space of time by combining four technologies on a single ship. In surface waters, trawls will catch specimens and bluewater scuba divers will collect, photograph, and observe live animals. However, bluewater diving, which is described elsewhere, is limited to the top 30-to-40 meters (m) of the sea because of human physiology constraints. Other technologies must be used to explore the ocean realm below.
Trawling
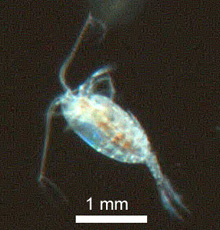
No expedition to explore the biology of the ocean can be complete without physical specimens. The use of horizontally towed fishing trawls to collect samples of robust animals is the oldest technology, but it has been updated. The MOC 10 trawl is a multiple opening/closing net, carrying up to six separate nets that can be opened and closed at chosen depths by controls on the ship at the surface. The mesh size of the nets is 3.0 millimeters, so the nets will catch macrozooplankton as well as micronekton. The system includes a CTD — an instrument that records conductivity (a measure of salinity), temperature, and depth. Other sensors, such asan oxygen meter and a transmissometer that measures water clarity, can be added.
ROV
Remotely operated vehicles (ROVs) are rapidly becoming the preferred tools for many kinds of in situ work in the deep sea. They provide the capability for direct observation and measurements at depth, as well as selective sampling of individual specimens. Because ROVs are tethered to, and powered from, a vessel at the surface, they can work underwater for long periods of time. The Global Explorer ROV that we will use on the Celebes Sea cruise can dive to 3,000 m. It is equipped with a high definition (HD) color video camera, a digital still camera, a 12-chambered suction sampler, and static canister samplers. The ROV has thrusters in three spatial planes, allowing it to hold position in midwater for extensive observations and to follow and collect individual animals. On our cruise it will also run quantitative video transects to match with the trawling data. The Global Explorer was designed and built by Deep Sea Systems International, an Oceaneering International Company.

A RopeCam is ready for launch over the side of the ship. The two yellow balls (on the top of the frame) will provide buoyancy and ensure that the camera remains right-side up, while it hangs suspended at depth. Click image for larger view and image credit.
RopeCam
National Geographic has been developing RopeCam — a low-cost, simple set of underwater-housed digital video cameras — over the past 12 years. Deployed on 5/16-inch lines and retrieved using a “pot hauler,” the camera packages are baited with tuna and can be placed on the sea floor or hung anywhere in the water column down to 4,500 m. Timers turn the lights and cameras on and off during a set time period. The resulting digital video is as good as any recorded from much more expensive manned submersibles or ROVs. The camera packages are usually deployed in groups of three, increasing the time and area of coverage beyond what can be accomplished with a single submersible. Animals that are not easily caught or trawled to the surface, such as giant deep-sea sharks, can be observed feeding and swimming.